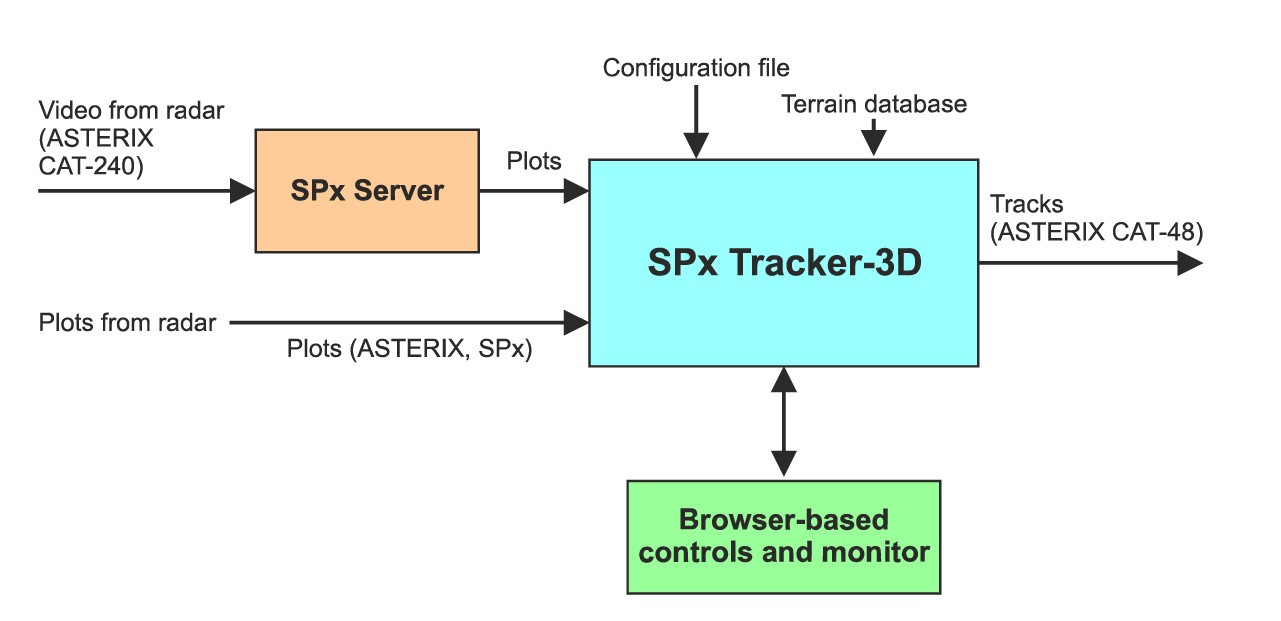
Plot detections from the radar sensor are used to create and maintain target tracks and can be output in ASTERIX format for external display or fusion processing.
The inputs to SPx Tracker-3D are plot detections. A plot detection is a measurement, typically characterised with a position, size and statistics derived from the radar. These plots may be generated directly from processing embedded in the radar, or may be provided by an external plot extractor (for example SPx Server) that converts radar video into plots. Plots may be input in SPx, ASTERIX or one of a number of proprietary formats. The modular construction of the software makes it easy to add new input formats as a custom extension.
Intelligent Track Processing
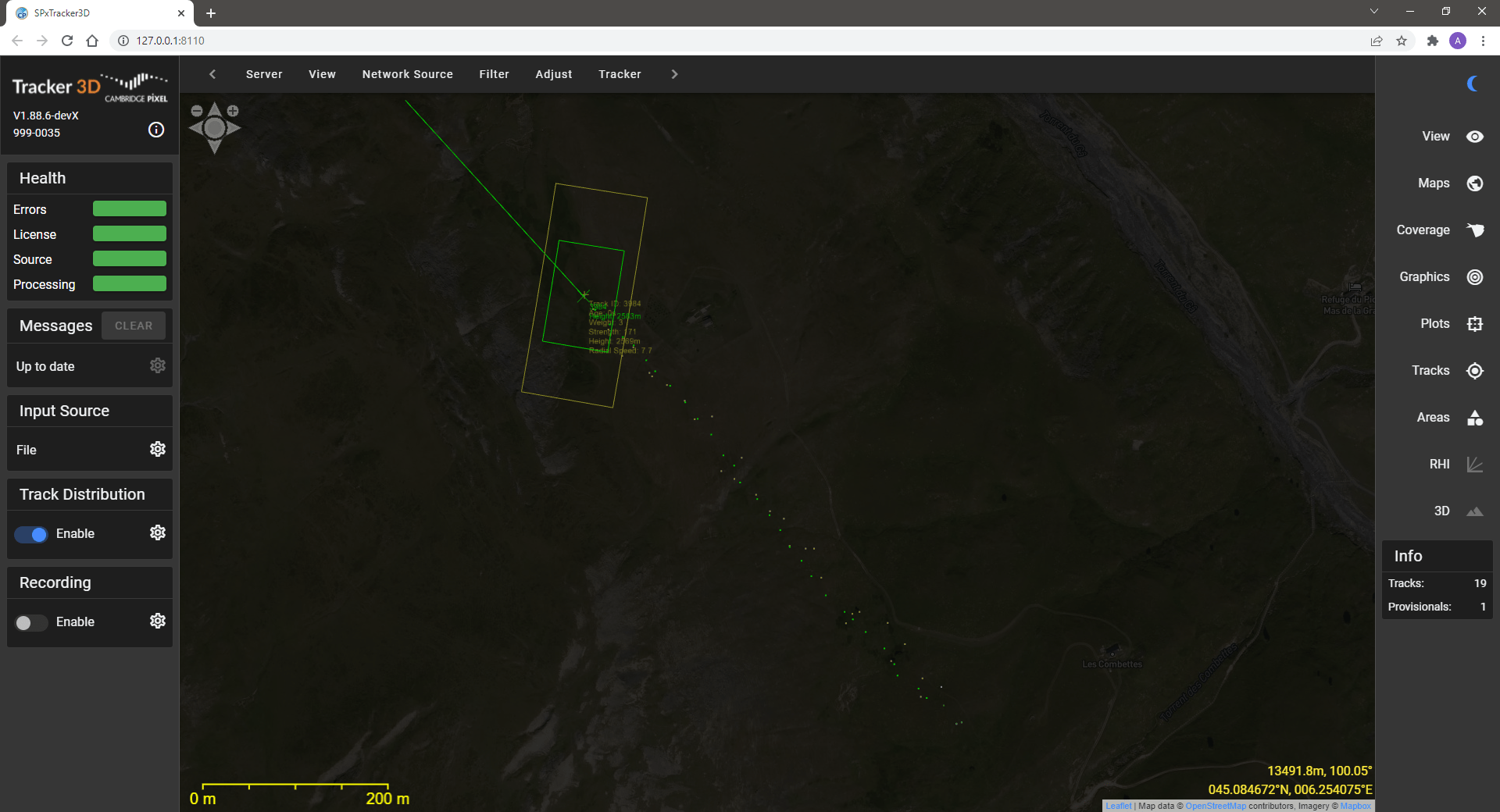
The processing inside SPx Tracker-3D seeks to associate new plots with existing tracks, so that track positions can be updated using a Kalman filter. Where new plots cannot be associated with existing tracks they become candidates for new tracks. After a configurable integration period related to a build-up of confidence in a provisional track, a track may be promoted to a full track. This process needs to balance the desire for rapid acquisition of a track with the need to minimise false alarms.
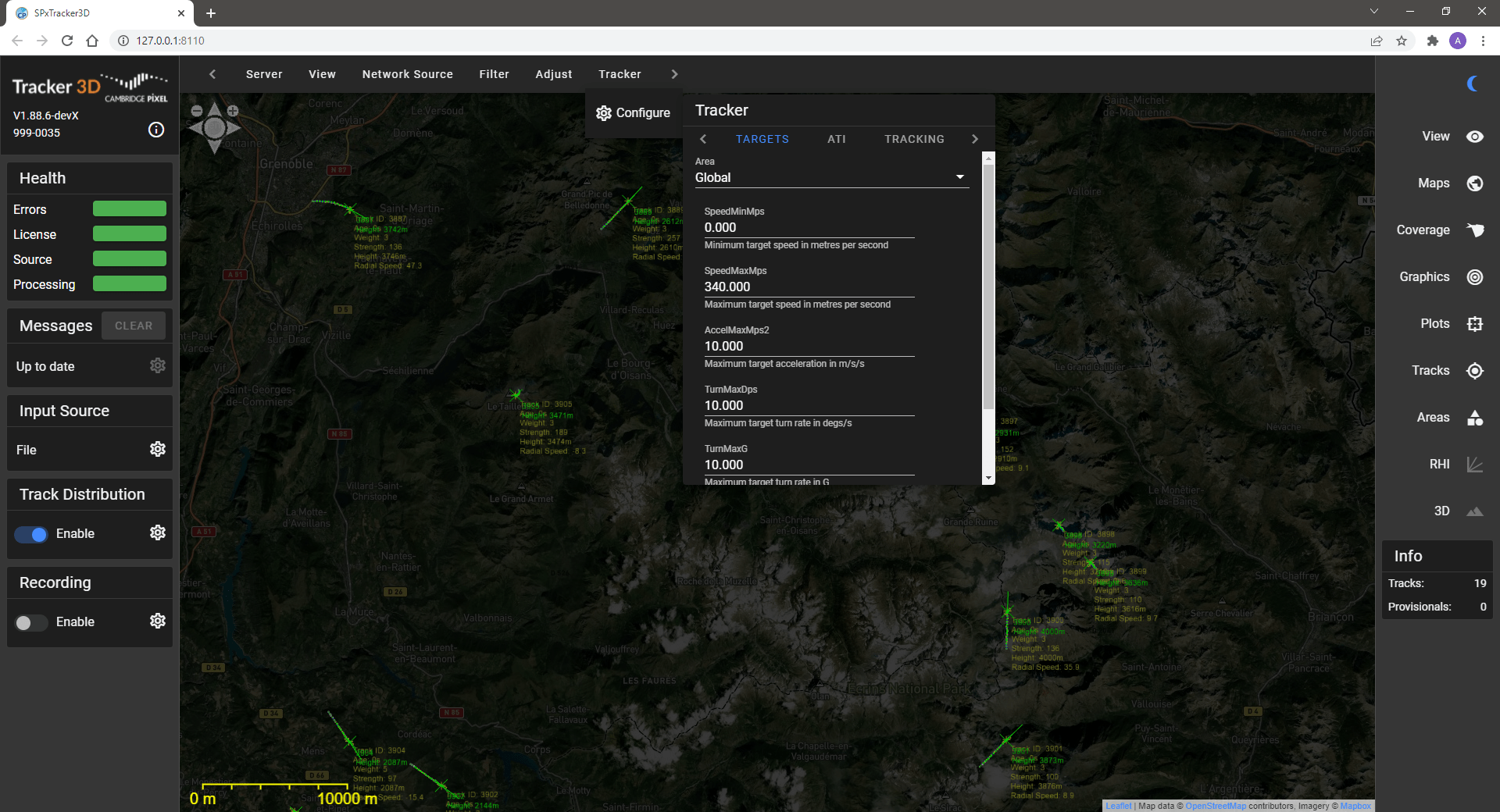
Configurable Parameters
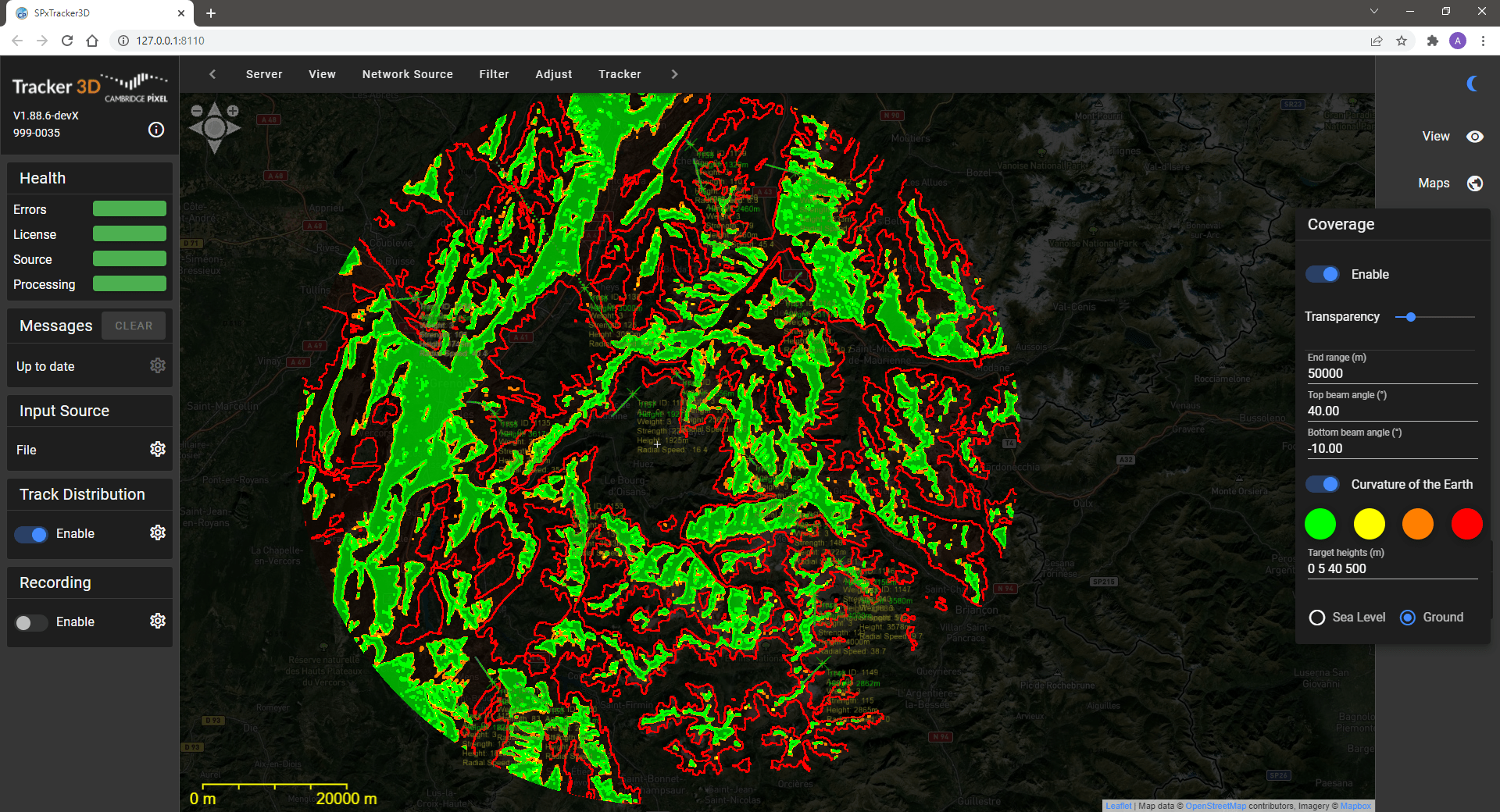
Building on the techniques originally developed for SPx Server, the parameters that affect the behaviour of SPx Tracker-3D may have area-dependent values. Parameter areas can have minimum and maximum heights, allowing parameters to be set as height-dependent. This is an important tool in allowing the behaviour of the track processing to be adjusted in different areas, for example to cope with different conditions or different needs.
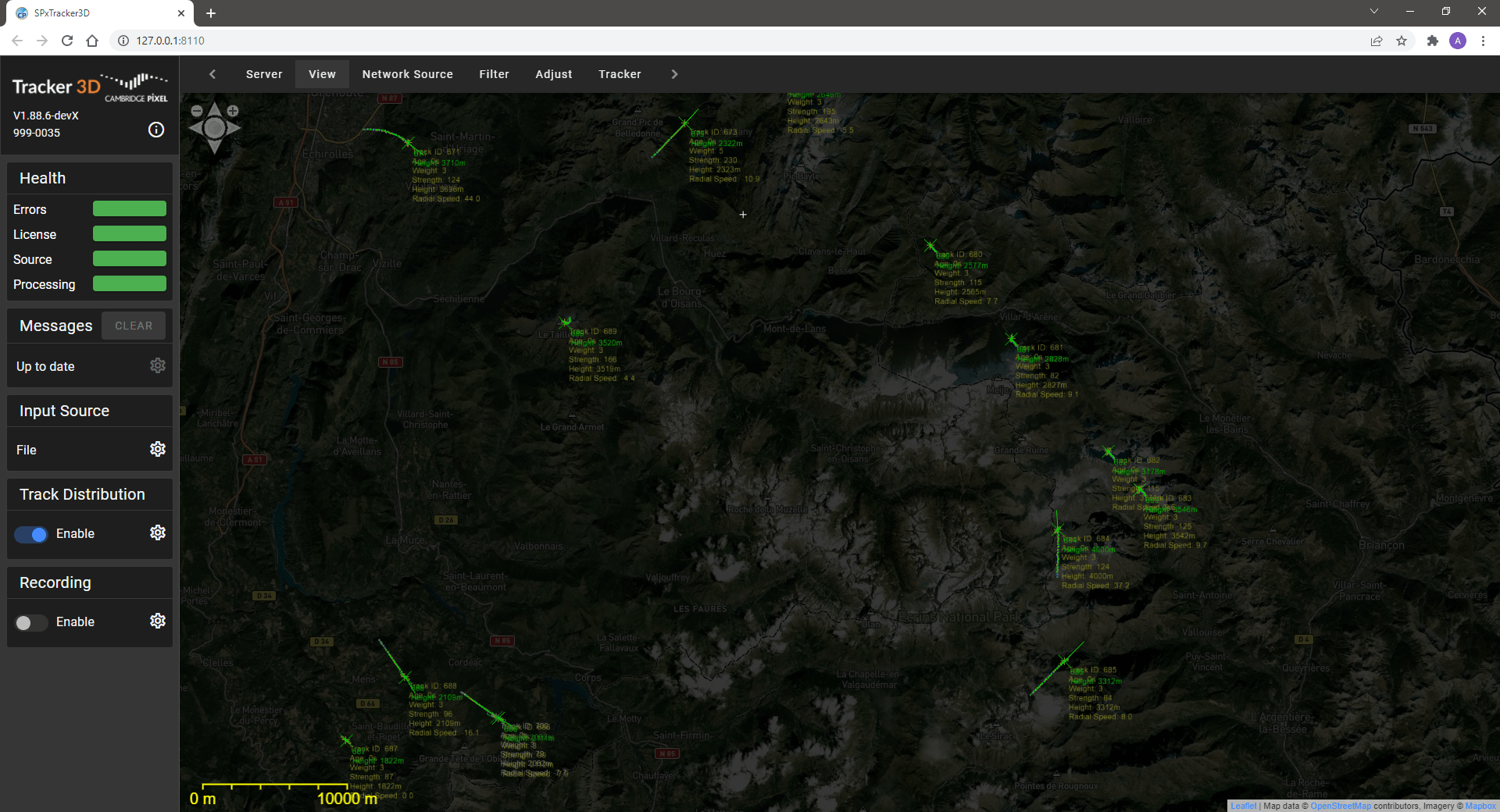
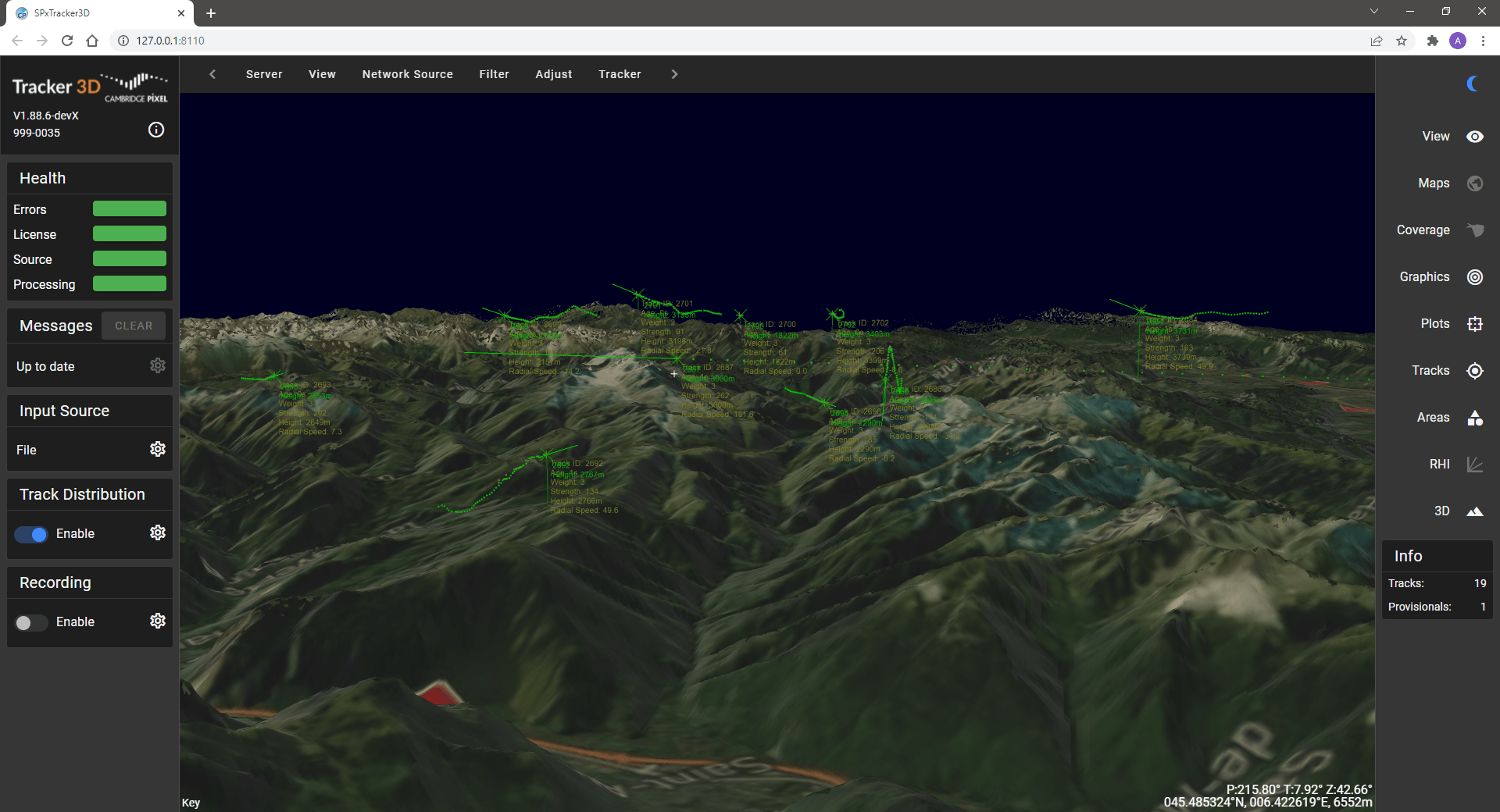
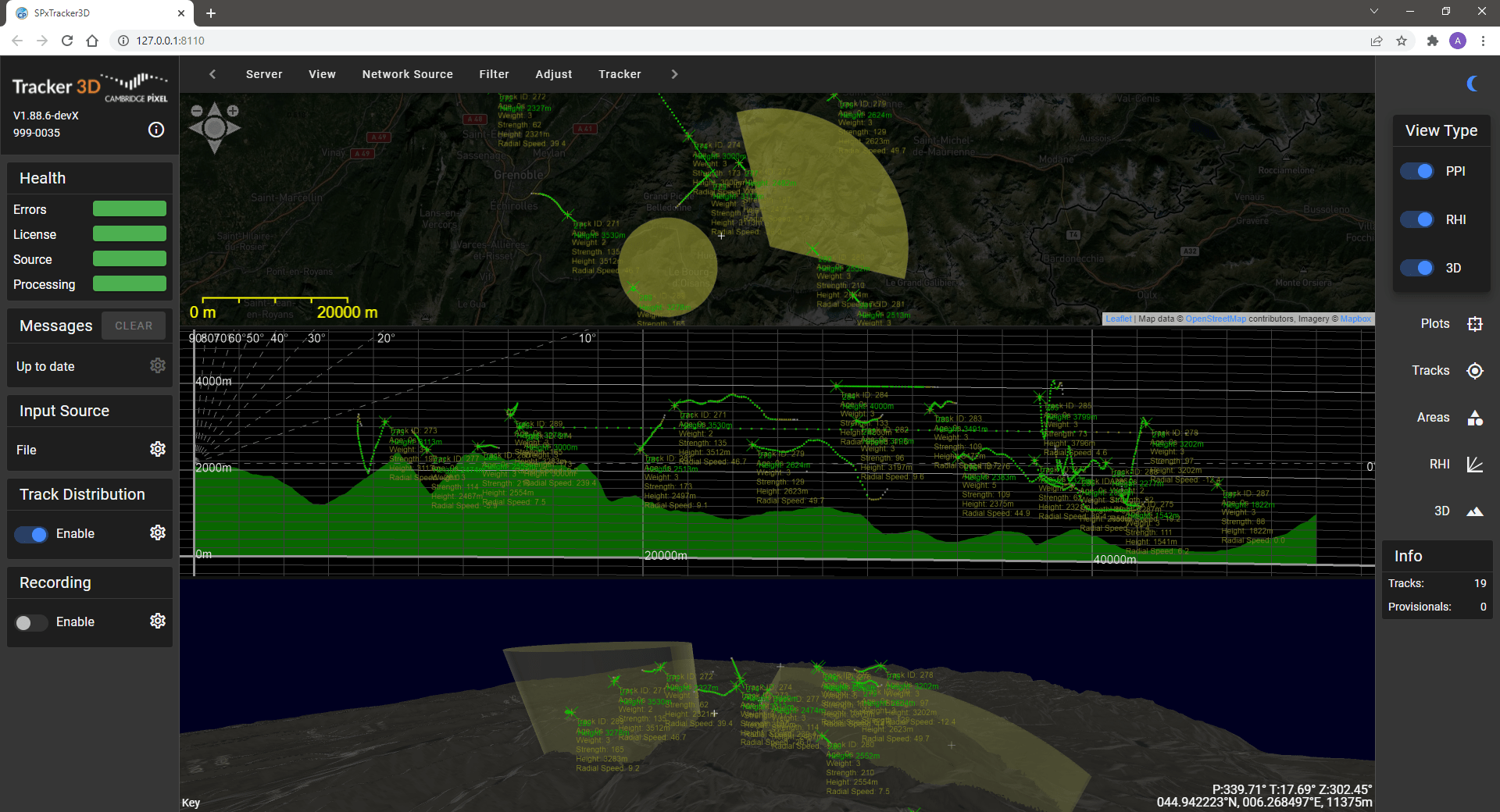
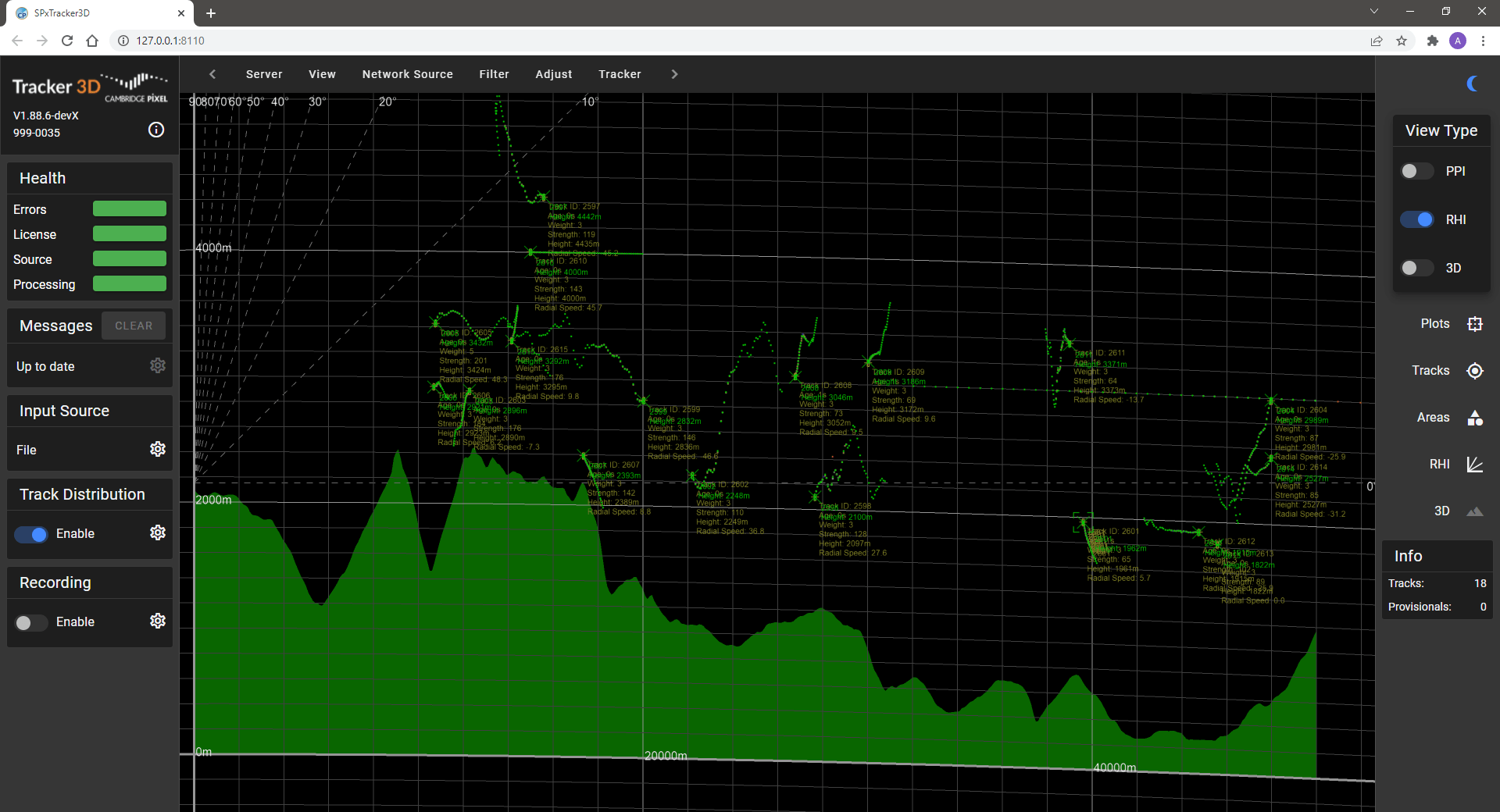
Browser-based UI with 3D Visualisation
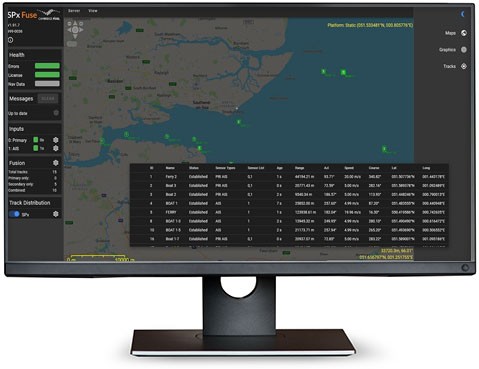
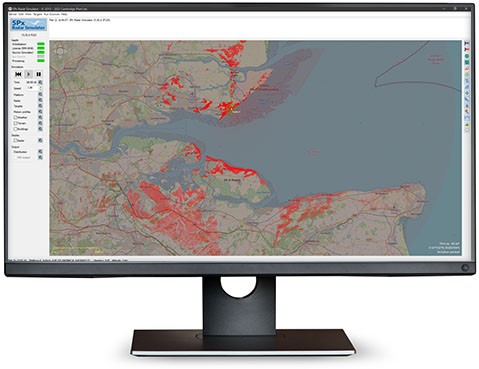
A browser-based user-interface provides the method of visualising plots, tracks, terrain and the associated configuration data. Track processing is sensitive to terrain, which is read from a database at startup to define the 3D space surrounding the sensor and permit the tracker to assess whether targets may be lost because of terrain. The user interface provides an intuitive display of terrain, plots and tracks, permitting the viewpoint to be moved in real-time to visualise the incoming radar detection and terrain.
Output Tracks in Multiple Formats
Track reports are sent through a configurable network interface in ASTERIX CAT-48 or SPx formats. Other formats may be supported for specific versions of the software. An SDK is available to support remote control and receipt of track reports using C++, C# or Java-based client code.
SPx Tracker-3D complements Cambridge Pixel’s SPx Server, which is focused on target tracking for conventional rotating radars.
System Configuration
Is this the right tracker for you?
Cambridge Pixel provides two radar tracking products. SPx Server is designed for rotating radars tracking targets in 2D. SPx Tracker-3D is intended for 3D radars, or radars that have non-rotating updates (typically electronically scanned). In most cases, SPx Tracker-3D is used for air targets (such air surveillance applications and drone detection), whereas SPx Server is used for coastal surveillance, maritime and airport ground movement applications.
Please complete the form below to request a product manual:
Real-World Application
Blighter Surveillance Systems, the designer and manufacturer of electronic-scanning radars and surveillance solutions, procured SPx Tracker-3D for use with its innovative A800 3D multi-mode radar, to discriminate between surface and airborne targets.