Software to support a wide variety uncrewed applications including minehunting, reconnaissance and environmental monitoring.
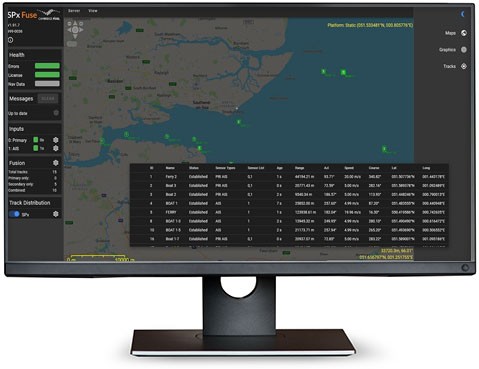
Powerful and Intuitive User Interface
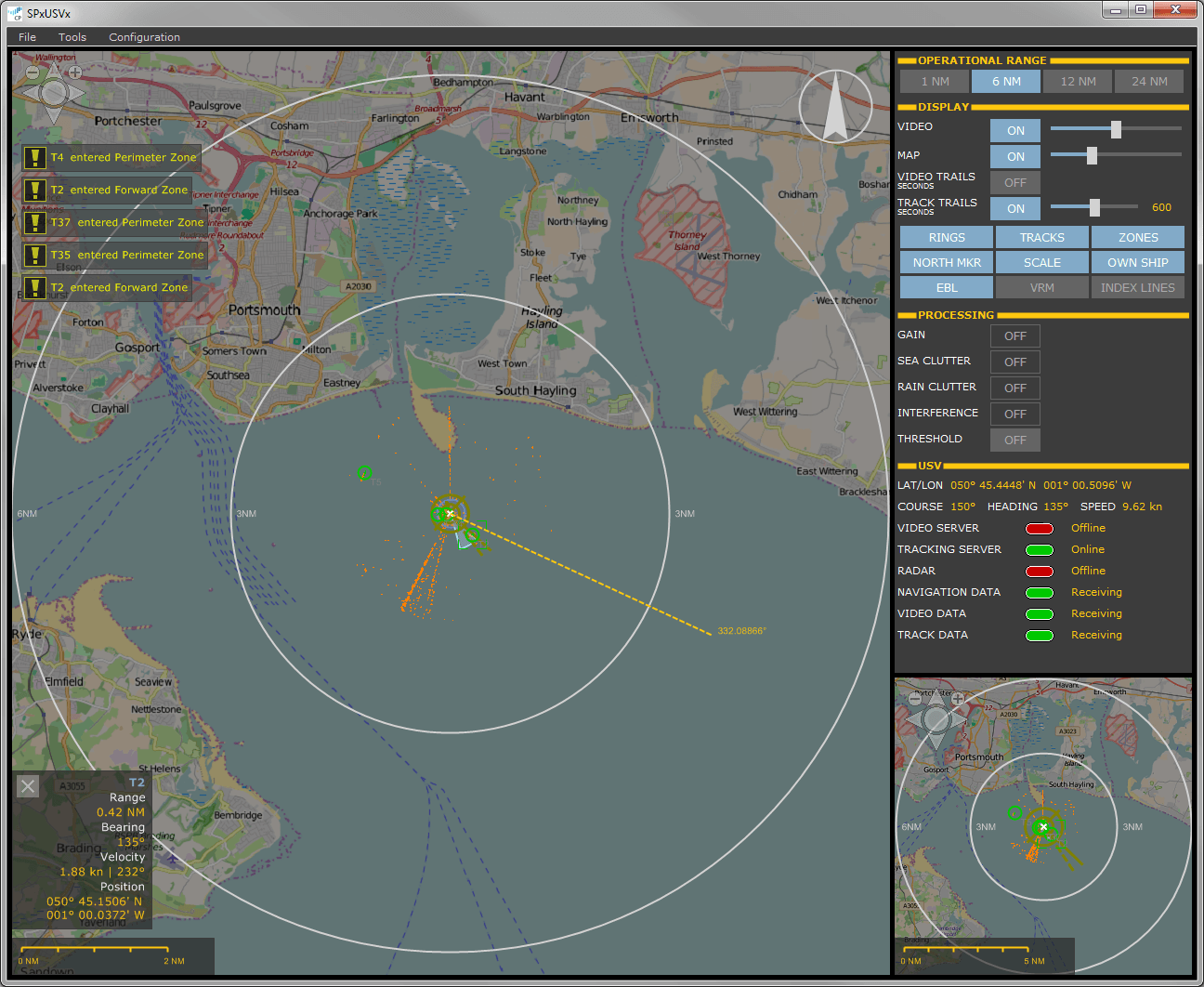
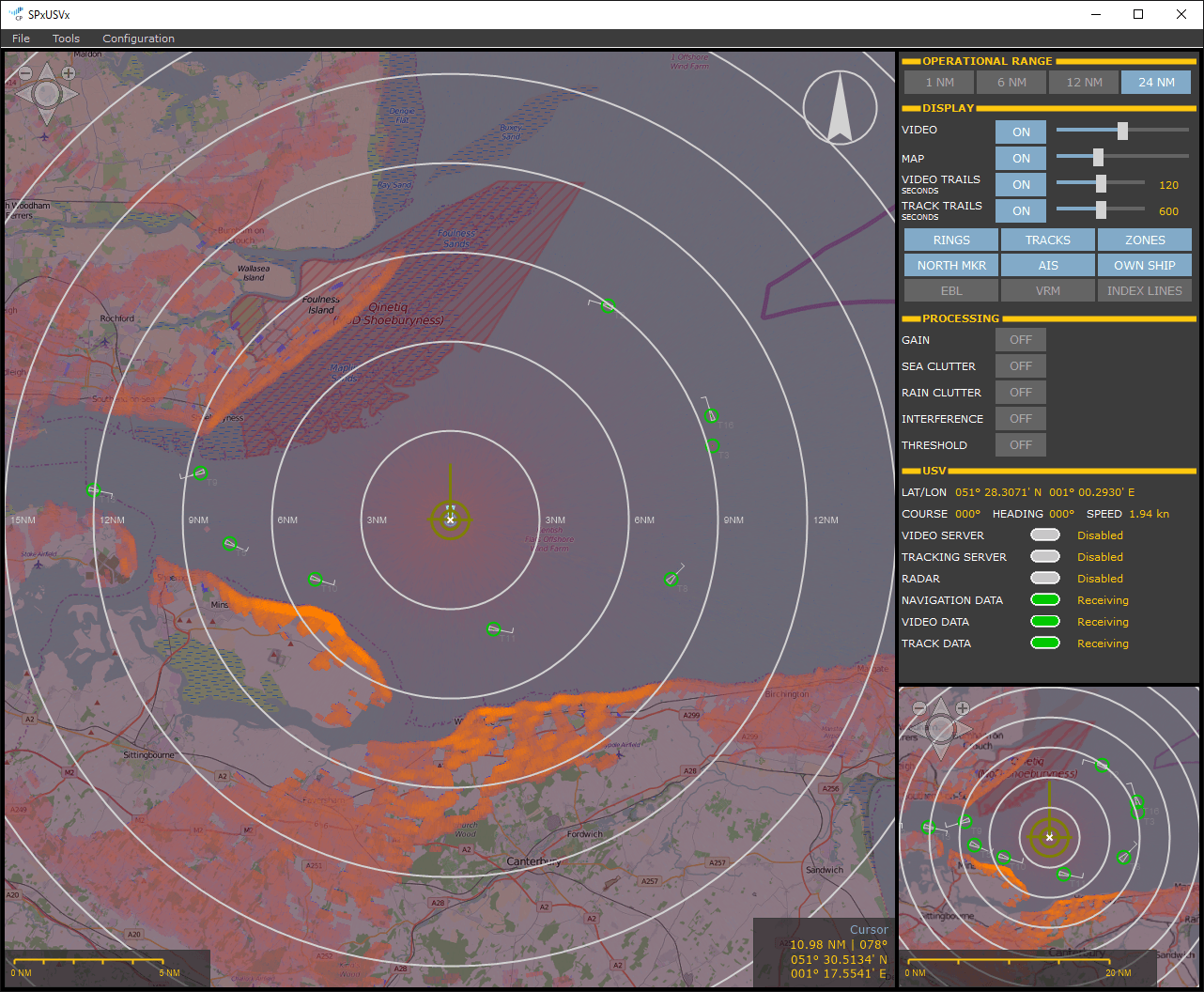
Designed to support touchscreens and allows the operator to change range scale, control the operation of the radar and tracker remotely, and monitor alarms and track reports.
USVx can display range rings, north and own ship markers, electronic bearing line, variable range markers and parallel index lines. Each of these may be separately enabled.
Alarm Zones
USVx provides two alarm zones: a circular Perimeter Zone that is centred on the uncrewed boat's position and a sector Forward Zone that is aligned to the USV's course.
When a track enters either alarm zone the operator is notified by an on-screen tote and/or an audible alarm. Alarms can be acknowledged and dismissed by the operator at any time.
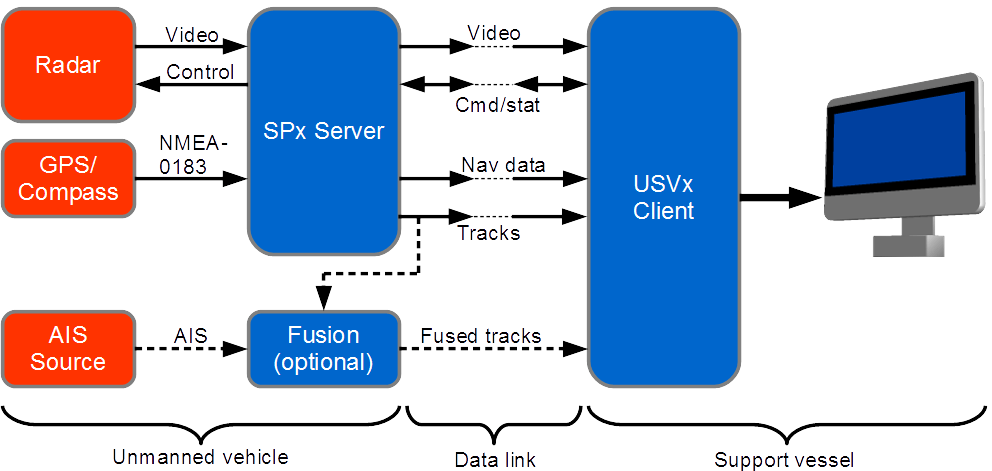
USVx is designed to be used in conjunction with SPx Server and, optionally, SPx Fusion Server, as part of a distributed processing and display solution.
USVx communicates with tracking and video server software on the USV using a data link typically implemented with microwave or satellite technology. The server is able to compress radar video to a data rate suitable for the bandwidth available on the link. Track reports and navigational data from a GPS and/or compass system are received as UDP packets over the data link. USVx can also control the operation of the radar itself using a network-based protocol, allowing key parameters such as gain, clutter processing and interference rejection to be set by the operator.