Jammed or Spoofed GPS is a critical problem for Uncrewed Surface Vessels which rely on GPS for navigation. On-board radars can be used to detect spoofed GPS and provide a radar-based navigation alternative.
The Typical USV System Configuration
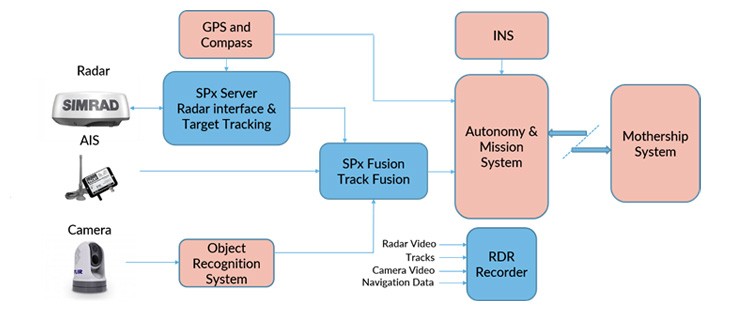
Small USVs typically use small-boat radars from manufacturers such as Simrad, Furuno and Raymarine. These radars are small, light, inexpensive and run from 12V DC power.
However, these radars are designed for use with a small display unit from the same manufacturer, and although they typically use standard TCP/IP interfaces for control and radar video output, the data protocols are proprietary and require authorised 'unlocking' for USV use. With the support of the radar manufacturers, Cambridge Pixel is able to ‘unlock’ the radars, control them and accept radar video from them, typically using SPx Server software to carry our plot extraction and target tracking from the radar video.
Other potential track sources on a USV include AIS and video object recognition systems, and track sources can be combined into a single track stream (Cambridge Pixel use SPx Fusion). The resulting track picture is passed to the autonomy system, where it is used for situational awareness and collision avoidance.
Why GPS is a vulnerability in USVs
In a conventional set-up, radar is not used for navigation. Although the GPS and compass data is passed into SPx Server, this is only to allow own vessel motion to be taken into account for target tracking on a moving platform. Only the GPS and compass, usually supplemented by an Inertial Navigation System (INS), is used for navigation. The INS will typically employ a number of Inertial Measurement Units (IMUs) employing MEMS, Laser Ring and Fibre Optic gyros and accelerometers. In the absence of GPS, the INS will sustain positional accuracy, but will ‘drift’ over time as measurement noise errors accumulate.
On a crewed vessel, the navigator can use radar to derive ‘Lines of Position’ by identifying topographical features both on a chart and in the radar image, and obtain a ‘Position Fix’ by triangulation. In addition, any GPS errors caused by GPS spoofing may be spotted by the misalignment of the radar image with the chart on the Electronic Chart Display Information System (ECDIS) assuming a radar overlay is available. On an uncrewed vessel these checks and balances are not available, making the vessel susceptible to GPS spoofing, or unable to navigate if GPS is denied (by equipment failure or electronic jamming, for example).
The radar-only navigation solution for USVs
Considering that USVs are often already fitted with a radar, and that it is indirectly connected to the Autonomy and Mission systems, it is possible to use the radar picture to obtain positional fixes, either to confirm that the GPS system is performing correctly, or to act as a backup in the absence of a functioning GPS.
Cambridge Pixel use this method in a solution called GPS-Assist which, being a software based ‘add-on’, does not typically require any additional hardware.
The principle of operation is that the radar image from a given position can be ‘modelled’ using terrain data, and this modelled image can be compared to the live image, captured from the radar, thus providing confirmation that the actual radar position matches the position of the radar used for the modelling.
The matching process provides an indication of the directional offset between the two positions, such that the process can be run iteratively by moving the origin of the modelled radar position to give the best match and, hence the best indication of the ‘radar derived’ navigational fix. In the absence of any further input from GPS, the position can be maintained by continuously repeating the process for subsequent sweeps of the radar.
Modelled Radar Image
Realistic looking radar video can be generated using a limited number of radar parameters and Shuttle Radar Topography Mission (SRTM) terrain data, which is in the public domain. Cambridge Pixel have developed a product called SPx Simulator to do this. SRTM-3 data has a resolution of 1 arcsecond, approximating to a 30m grid, which is good enough for realistic navigation radar modelling under most circumstances. Other parameters used in the radar image modelling are the radar mounting height, its beamwidth, pulse width and resolution. The curvature of the earth is taken into account, and multiple ‘line-of-sight’ calculations are made to detect intersections with the terrain.

Multiple line-of sight calculations, together with radar specific parameters are employed

Typical resulting image
Live Radar Capture
Live radar video needs to be captured and converted from the proprietary data format employed by the radar manufacturer, and output in a standard format such as ASTERIX CAT-240. Cambridge Pixel use SPx Server for this, but it is not mandatory for radars which output in a standard format, or where an analogue radar video is captured and converted to ASTERIX by an adaptor. In GPS-Assist, the polar format (range-bearing) radar video is scan-converted to cartesian (x,y) format. ‘Land-detection’ processing is carried out in polar space, subsequent processing is carried out in cartesian space to simplify the measurement of radar position errors...
Subscribe to continue reading this article, it's free.
Free access to Engineering Insights, authored by our industry leading experts.
You will also receive the Cambridge Pixel newsletter which includes the latest Engineering Insights releases.
Fill in the form below and you will be sent an Instant Access link.