For applications of radar tracking on a ship, the heading of the ship hosting the radar must be taken into account when processing the data from the radar. By heading we mean the direction that the ship is pointing (as opposed to course which is the direction the ship is sailing).
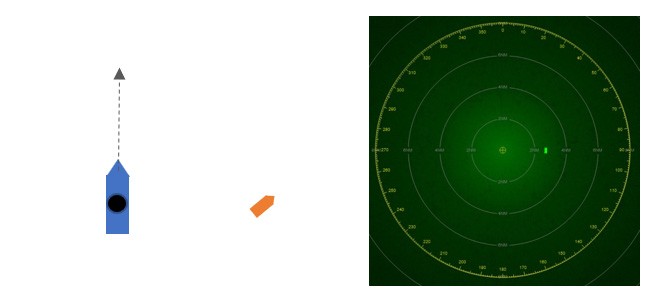
Since the radar is fixed to the structure of the ship, the azimuth position of a target will depend on both the relative position of the target and the heading of the ship. In Figure 1, the ship (blue) is heading North and observes a stationary target (orange) to the East. The target appears at 90 degrees on the radar image - right-hand image in Figure 1.
Now if the ship changes heading to 340 degrees (Figure 2) then the target appears at 110 degrees on the (heading-relative) radar image, which is the azimuth of the target relative to the heading of the ship.

The purpose of the radar tracker is to estimate the absolute position and motion of targets. The motion of the ship hosting the radar should not be relevant, so we would expect that changes in ship's position, speed or heading have no effect on the estimation of the position and dynamics of surrounding targets. To achieve this, the data provided to the tracker is required to be North referenced. This means that azimuth 0 seen by the tracker is North. In the examples of Figure 1 and 2 above, the radar image is heading-referenced, meaning that azimuth 0 is the heading of the ship and therefore the apparent position of the target changes as the ship's heading changes.
To adjust the radar data from heading-referenced to North-referenced, we simply apply an offset to the radar image to rotate it by the heading of the ship. In the case of Figure 1, the rotation is 0 because the ship is heading North. For Figure 2 the radar image is rotated by +340 degrees (or -20 degrees). This has the effect of bringing the position of the target back to 90 degrees, the same as in Figure 1. In other words, although the ship has changed heading from 0 to 340 degrees, the image of the target on the radar remains fixed at 90 degrees, which means that target remains due East of the ship (the image is North referenced).
Removing the Effect of Ship Heading
The process of adjusting the radar image using the ship's heading must be done continuously, so that each azimuth of the radar is adjusted by the heading of the ship at the time that azimuth is collected. If this is done correctly, then the ship's heading is completely removed and a stationary target appears to be at the same (North referenced) azimuth whatever the ship's heading is. Ideally, the heading of the ship would be sampled at the same time and at the same rate as the incoming azimuths from the radar, allowing an azimuth-by-azimuth adjustment of the radar data. However, this is generally not how it works and this is the source of a potential problem.
Subscribe to continue reading this article, it's free.
Free access to Engineering Insights, authored by our industry leading experts.
You will also receive the Cambridge Pixel newsletter which includes the latest Engineering Insights releases.
Fill in the form below and you will be sent an Instant Access link.