Fuse observations from multiple independent sensors (radars, IFF, ADS-B and AIS) into a single output stream of correlated track reports with SPx Fusion Server software.
Fuse All Target Tracking Data
SPx Fusion Server solves the complex challenges of using track data when tracking with multiple radars and sensors.
Track reports, typically derived from primary or secondary sources, such as radars, IFF, ADS-B and AIS, are processed by SPx Fusion Server using prioritisation and scoring to assess the credibility of data from each sensor.
Supporting both co-located sensors and other sensors with overlapping coverage, the software can fuse the data into a single track report containing the most reliable information and a consistent set of track labels across the combined coverage area.
Flexibility to Support Many Sensors
Operating as a multi-sensor track correlator, the software is available as a Windows or Linux application for Intel architecture PC workstations or servers.
Depending upon which software licence is purchased, a single instance of SPx Fusion Server can support between 2 and 32 sensor inputs. Where more sensor inputs are required, multiple instances of SPx Fusion Server can be cascaded, either locally to one another, or remotely over a network.
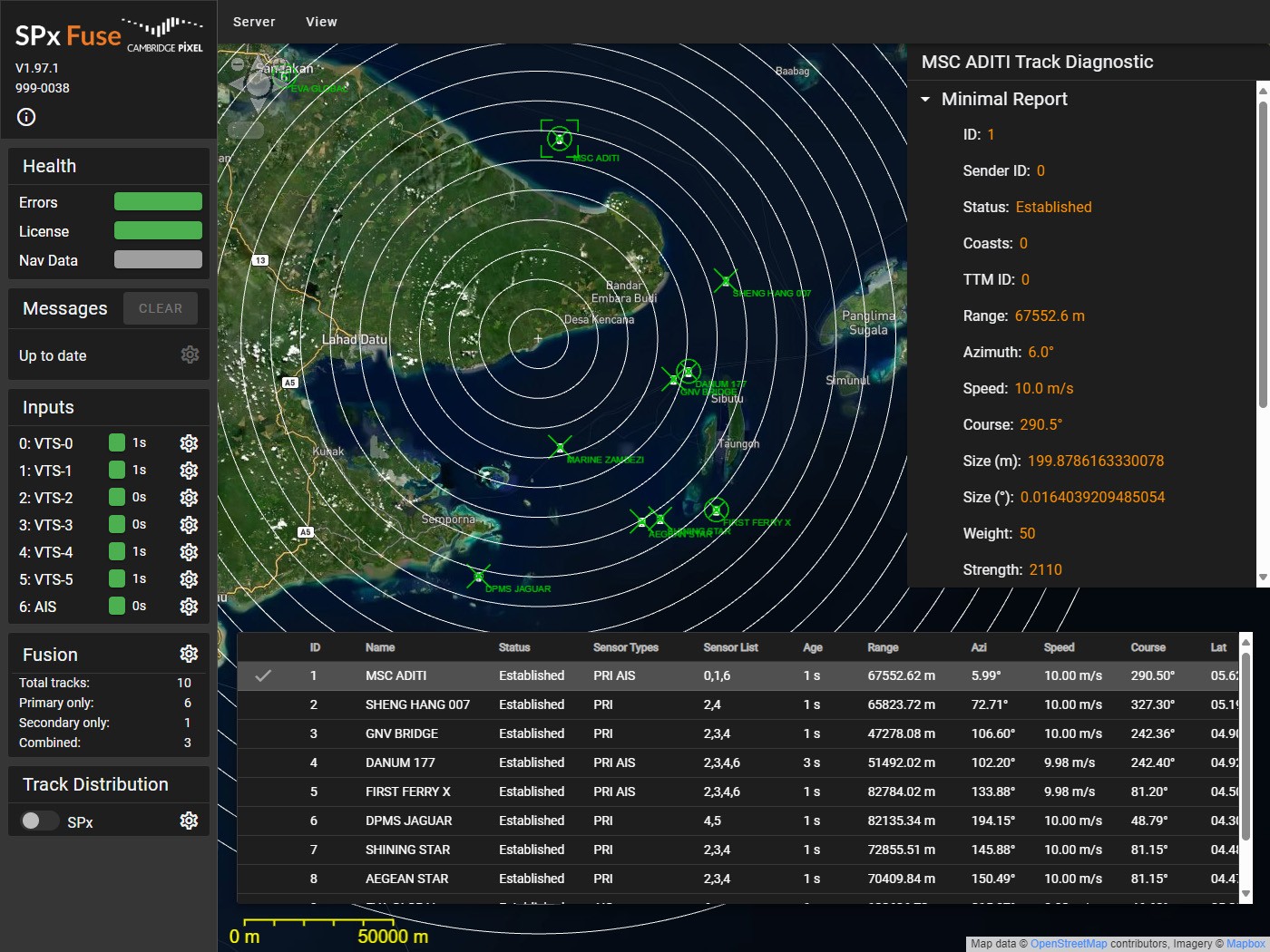
SPx Fusion Server combines track reports from up to 32 sensor inputs per licence, into a single report, using the most reliable data.
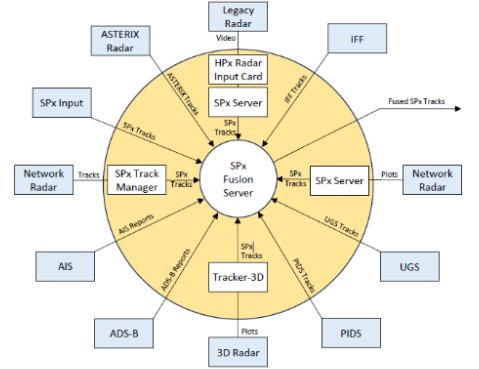
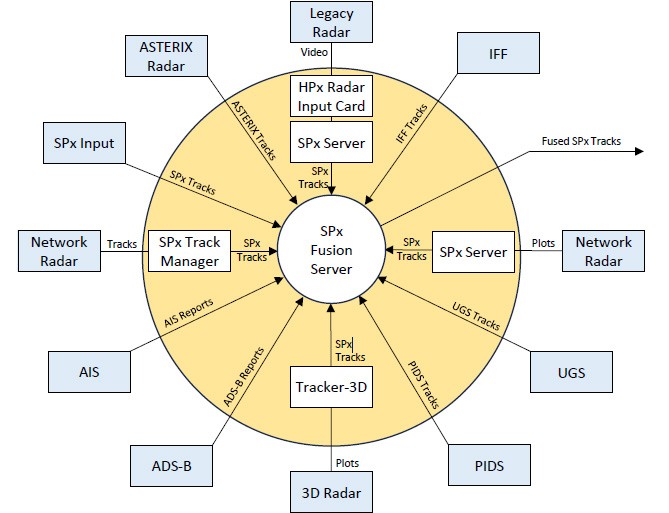
The track reports supplied to SPx Fusion Server are typically derived from primary or secondary sources, such as radars, IFF, ADS-B and AIS. However, as long as sensor reports are georeferenced, observations from perimeter intrusion detection systems (PIDS) and unattended ground sensors (UGS) can also be interfaced. Such PIDS or UGS systems can provide reports from a more diverse range of sensor technologies, including acoustic, electro-optic, magnetic, passive infrared and seismic sensors.
Primary radars are typically interfaced via an ASTERIX format network data stream. Non-standard data streams can be interfaced and converted to SPx format via Cambridge Pixel’s SPx Server (2D radars), SPx Tracker-3D (3D radars) or SPx Track Manager software. Cambridge Pixel’s wide array of HPx-series radar input cards provide legacy interface support for older primary radars that do not output via Ethernet.
Sensor Prioritisation & Scoring
SPx Fusion Server allows the assignment of “priority” and “score” values to observations from each sensor, which means that the credibility of information from each sensor may be established by the fusion engine. Information from sensors which are believed to be more accurate may be given greater credence than other, possibly less accurate, sensors.
Where observations for a target are received from multiple overlapping sensors, information from the sensor with the highest priority setting is selected by the fusion engine in preference to the others. If multiple sensors share the same priority level, the decision is based on the proximity of the target to each sensor.
The fusion engine will only report fused tracks if the combined score of all sensors supplying observations for the track, meets (or exceeds) the threshold score of “1.0”. For example, if the score for each sensor is set to “0.5”, then reports will only be output for targets observed by at least two sensors.
Combines Co-located Sensors
Where two or more sensors are co-located and covering the same area, SPx Fusion Server can be used to provide a combination of the available information within a single, unified track report.
The track report for a target visible to multiple sensors will contain the most reliable information available from the various sensors. Also, where one sensor provides information that another does not, the track report is a union of the information from both, ensuring that the richest dataset is made available.
Combines Overlapping Sensors
Where a number of radar sensors provide overlapping coverage, it is often desirable for an observer to be presented with a single, consistent set of track labels across the combined coverage area. This is a common requirement with VTS, coastal surveillance systems and land border security applications.
Essentially, this means that where a target is seen to traverse from the coverage of one sensor into the next, the track label will not change as it does so. Nor should the observer be presented with two or more possible tracks representing the same physical target. SPx Fusion Server eliminates such problems by ensuring consistent track labelling with a single global track ID across the whole coverage area.
Lockheed Martin integrated SPx Fusion into their Naval Vigilance Radar system for the Royal Navy, to combine tracks from multiple radars on the ships with AIS (automatic identification system) transponder data and other sensor data into a single, integrated data source.