

Trust the Leading Experts in Radar & Sensor Processing Technology


Integrate Radars, Cameras & Sensors into USV & ASV Systems
Flexible and affordable technology to support navigation, collision avoidance, mothership communication and target recognition in commercial and military USVs / ASVs.
Speed up project delivery, reduce costs and improve performance using our modular solutions to add and improve capabilities.
Core Capabilities for USV Developers
Our flexible solutions include radar interfacing, target tracking, fusing radar and sensor data, camera control, alarms, multi-sensor data recording and navigating in GPS-denied environments.
Compatible with Open Standards protocols such as ASTERIX and NMEA-0183, numerous proprietary formats and the SAPIENT standard, our solutions can integrate with many devices and third-party systems.


Partnerships with Radar Suppliers
Cambridge Pixel has partnerships with leading manufacturers like Simrad and Furuno, allowing inexpensive marine radars to be 'unlocked' for use with custom software.
View the BrochureUSV Radar and Sensor Systems
Unmanned Surface Vessels (USVs) and Autonomous Surface Vessels (ASVs) are a rapidly expanding area of interest for naval forces and commercial enterprises around the world.
Cambridge Pixel is a provider of key technology components for USV development and has supported projects for leading developers and manufacturers across the US, Europe and Asia.
USV Radar & Sensor Processing Solutions Diagram
Use our Solution Finder to find which products can best meet your project requirements.
Solution Finder
Uncrewed Surface Vessels Case Studies
View all case studies...



Uncrewed Surface Vessels Products

USVx
Control and view radar sensors and tracking functions on Uncrewed or Autonomous Surface Vessels

Maritime Display Framework (MDF)
Baseline application for development of C# client applications

SPx RadarLink
Radar Video over Low Bandwidth or Unreliable Links

GPS Assist
Detects and compensates for loss, spoofing or jamming of navigation data

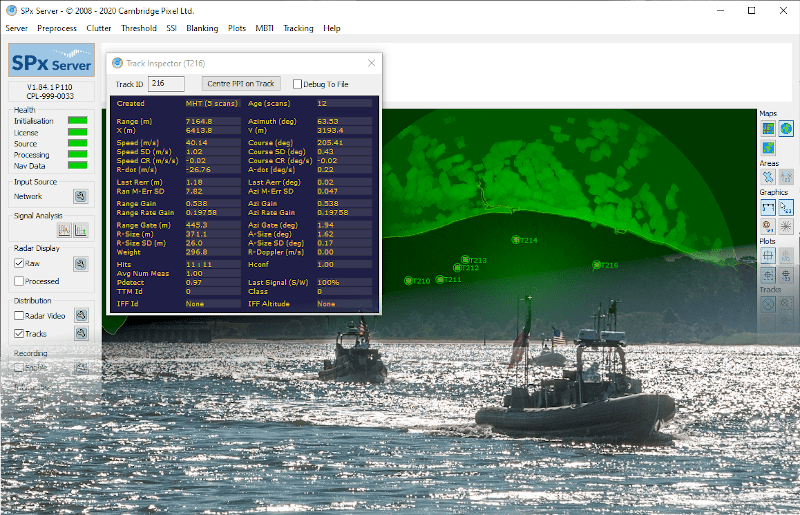
SPx Server (Tracking & Distribution)
COTS software application to acquire, process and distribute radar data, plots and tracks
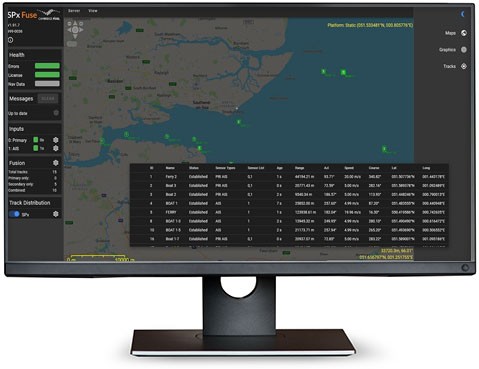
SPx Fusion Server
Combines target observations from multiple sensors into a single stream

RDR Data Recorder
Multi-channel record and replay of radar and camera video, audio, targets and network data
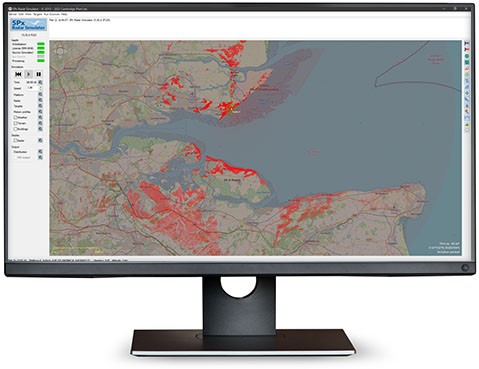
SPx Radar Simulator
Ready to run application to generate simulated radar video, tracks and navigation data
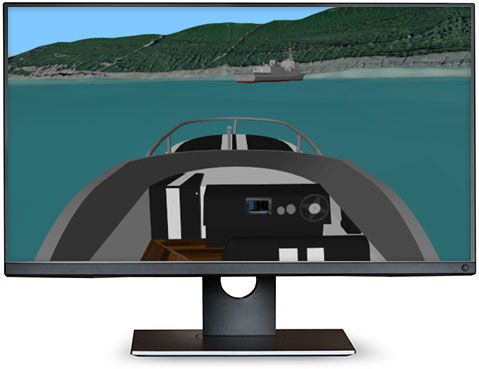
SPx Video Simulator
Simulate Camera Video for Development, Testing & Training.
Get Advice & Pricing
To ensure your solution delivers your required capabilities, tell our team about your project and we'll use our decades of experience to give you the very best advice.
Our solutions are cost-effective for businesses of all sizes and we have flexible licensing options to suit different requirements.